|
Zhaoyuan Gu I'm a Ph.D. student in Robotics at the Georgia Institute of Technology, working in the LIDAR group. My research interests include planning and control methods for humanoid robots, robust bipedal locomotion, and loco-manipulation. Before this, I earned my Master's degree in Mechanical Engineering from Carnegie Mellon University and my Bachelor's degree from Tsinghua University. |

|
Research ExperienceMy work focuses on legged robots interacting with the physical world — bipedal locomotion, whole-body control, and reinforcement learning for robotics. |
|
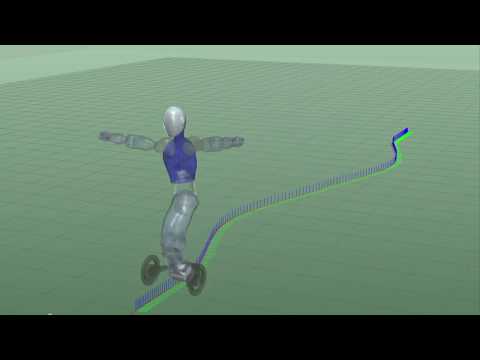
Dynamic Control of Wheel-Based Humanoid Robot
Zhaoyuan Gu video Dynamic balance and motion control of a wheeled humanoid robot platform. |

|
Monkey Robot Continuous Brachiation
Zhaoyuan Gu video Continuous brachiation locomotion for a monkey-inspired robot, swinging between handholds. |

|
Hexapod Robot Wave Gait on Stairs
Zhaoyuan Gu video Wave gait locomotion for a hexapod robot navigating staircase environments. |

|
UR5 Path Search and Obstacle Avoidance
Zhaoyuan Gu video / code Motion planning and obstacle avoidance for the UR5 robotic arm using MoveIt. |

|
AR-A3C: Adversarially Robust Asynchronous Advantage Actor-Critic
Zhaoyuan Gu video / paper Reinforcement learning with adversarial robustness for continuous control tasks. |

|
Humanoid Robot Bipedal Locomotion Control
Zhaoyuan Gu video Bipedal locomotion control for a full-size humanoid robot. |
Independent Projects |

|
Snake Robot
GitHub A bio-inspired snake robot with serpentine locomotion gaits. |

|
Roboseum — Open Source Robot Collection
GitHub An open-source collection of robot designs developed at Tsinghua University's SkyWorks lab. |

|
Fusion 360 CAM Challenge
video CAM toolpath generation and machining simulation using Autodesk Fusion 360. |
|
|
Drake Tutorial
drake.guzhaoyuan.com Drake concepts and C++ examples for robot simulation and control. |